An Adaptive Autonomous Machine can be described as a machine which is able to move in an unknown place and complete some specific task which was defined before the discovery. These systems can behave as a human and help us about difficult duties, after they are programmed. One of the difficult duties of everyday life is house works. The aim of the project is programming a machine which can clean a house as a smart broom and considering of performance of different algorithms.
While a smart broom project is coding, there are few difficulties which should be observed. They are deciding how to behave when meet a barrier, updating the map of the house and finding the next movements.
One of the pivotal points of the project is barriers. There are a lot of furniture in a room which can be considered as a barrier by the system such as wardrobes and sofas. Despite the fact that the barriers prevent a broom pass the next step, the cleaner should not be stop doing the task. Because of this reason, the system should be programmed to recognize barriers. The sensors surrounded device can help device to be acknowledged about the current situation.
Another important handicap is updating the map. The map of a house or a room should be update after every step. There are plenty of algorithms as a solution of this problem. Eight Neighbor Kernel Laplace (8-NKL) is one of the quite simple solutions. The project is developed to use two kinds of algorithms, 8-NKL and 4-NKL.
The last scope is finding the next step. After every step, broom should be deciding the next direction to move. Finding the least visited neighbor should be one of the convenient methods, which is programmed in project.
However, Smart Broom Project has only little to offer you about adaptive autonomous machines. It is convenient to understand of a simple smart device. In near future, the smart systems and its projects will be more popular.
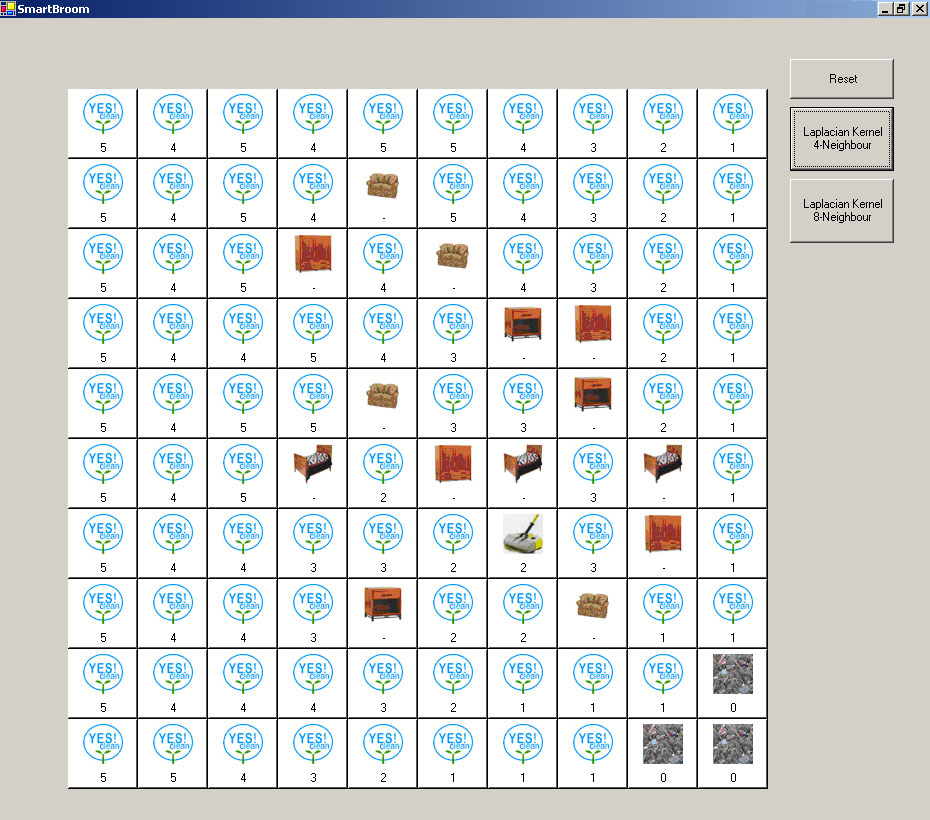
Screenshot: